
Принцип работы квадрокоптера.
Квадрокоптеры являются частным случаем мультикоптеров — многороторных устройств, которые держатся в воздухе, управляются и перемещаются только за счет несущих пропеллеров. В этом мультикоптеры схожи с вертолетами. Для простоты и краткости в обиходной речи мультикоптеры часто называют просто коптерами. Мы тоже будем использовать этот термин в случаях, когда количество роторов не играет роли.
Классический квадрокоптер представляет собой крестообразную раму, на концах лучей которой вертикально закреплены моторы (рис. 1.1).
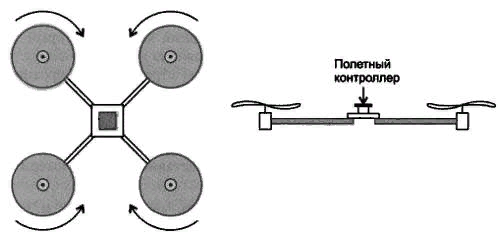
Схема конструкции простейшего квадрокоптера
Воздушные винты, расположенные на диагональных лучах рамы, создают суммарную вертикальную тягу.
Синхронно регулируя обороты моторов, можно заставить квадрокоптер подниматься вверх, зависать или опускаться.
Если изменить обороты моторов неравномерно, то квадрокоптер отклонится от горизонтального положения и полетит в сторону отклонения.
Например, при увеличении оборотов двух задних моторов его задняя часть приподнимется и квадрокоптер полетит вперед.
За счет неравномерного изменения оборотов всех моторов квадрокоптер способен лететь в произвольном направлении.
Очевидно, что при наклоне рамы за счет появления горизонтальной составляющей вектора тяги Vx уменьшится вертикальная составляющая Vy и квадрокоптер начнет терять высоту.
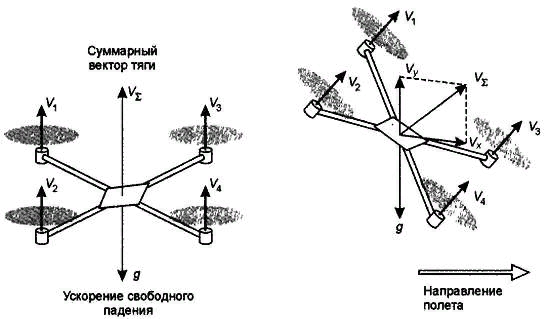
Векторы тяги квадрокоптера
Это явление иногда называют «соскальзыванием», потому что коптер начинает двигаться вниз по диагональной траектории (рис. 1.2), словно скользя по склону.
Поэтому для поддержания высоты при наклоне квадрокоптера обороты всех моторов должны возрасти на некую одинаковую компенсирующую величину.
Вращающиеся винты создают реактивный крутящий момент, который старается развернуть квадрокоптер в сторону, противоположную вращению винта.
Поэтому в квадрокоптере два винта вращаются по часовой стрелке и два против часовой стрелки, взаимно уравновешивая реактивные моменты.
Если увеличить обороты моторов, вращающихся по часовой стрелке, и в равной мере уменьшить обороты у вращающихся против часовой стрелки, то суммарная вертикальная тяга не изменится, однако реактивный момент скомпенсируется и рама начнет поворачиваться против часовой стрелки.
Аналогично можно заставить квадрокоптер поворачиваться по часовой стрелке.
Угловые отклонения по осям следовало бы называть «тангаж», «крен» и «рыскание», но на практике прижились англоязычные термины, которые важно запомнить — рис. 1.3.Pitch (наклон вперед-назад,тангаж), Roll (наклон вправо-влево,крен), Yaw (вращение в горизонтальной плоскости, рыскание),Throttle (общий газ)
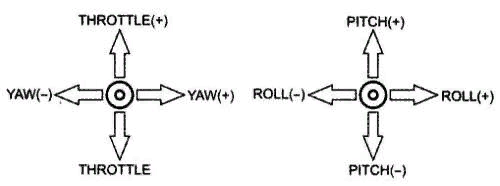
Соответствие отклонений коптера рычагам на пульте
Оборотами моторов в режиме реального времени управляет специальная вычислительная система на основе достаточно быстродействующего микроконтроллера, так называемый полетный контроллер
Он постоянно опрашивает встроенные гироскопы, акселерометры, барометр, сигналы от приемника радиоуправления и на основе полученных данных рассчитывает управляющие сигналы для каждого мотора в отдельности.
Достоинства
• Простота конструкции и низкая стоимость ущерба при аварии.
Квадрокоптеры держатся в воздухе только за счет несущих пропеллеров и этим похожи на вертолет.
Однако полноценная модель вертолета имеет весьма сложную и точную механическую часть — автомат перекоса, позволяющий управлять положением вертолета в пространстве. Кроме этого, вертолет оснащен механизмом отбора мощности на хвостовой винт и узлом переменного шага этого винта.
По сравнению с вертолетом механическая часть даже у большого профессионального квадрокоптера предельно проста и не зависит от размеров модели.
Это жестко закрепленные на лучах рамы моторы, на валы которых надеты воздушные винты.
Автомат перекоса вертолета требует сложной и длительной регулировки даже при наличии опыта. Каждая авария вертолета, даже незначительная, как правило, дорого обходится владельцу. Причем в запасе приходится держать широкий ассортимент различных запчастей.
Самодельный квадрокоптер можно разбить почти полностью и восстановить за один выходной день, пользуясь в основном подручными материалами.
В запасе достаточно иметь пару запасных валов и подшипников для моторов, один-два регулятора оборотов, десяток винтов правого и левого вращения и материал для изготовления лучей рамы.
• Простота управления и обучения.
Несмотря на то, что квадрокоптер, как и вертолет, управляется за счет смещения вектора тяги, он более стабилен в воздухе (чем крупнее, тем стабильнее).
Управление квадрокоптером интуитивно более понятно и легче осваивается. Кроме того, благодаря наличию полетного контроллера, правильно собранный и минимально настроенный квадрокоптер способен висеть в воздухе практически без участия пилота.
• Простота самостоятельного изготовления.
Если заранее приобрести минимальный набор необходимых компонентов и иметь обычные инструменты, то изготовить простой, но качественный квадрокоптер можно за один-два выходных дня.
При создании рамы можно обойтись парой кусков фанеры и несколькими деревянными рейками, и это не ухудшит летные качества устройства.
• Возможности для творчества.
Менять и развивать конструкцию самодельного квадрокоптера можно практически бесконечно.
Недостатки
• Полное отсутствие летучести.
Квадрокоптер хорошо летает, только пока полностью исправен. Стоит выйти из строя одному из моторов или полетному контроллеру, как летательный аппарат потеряет управление и рухнет, беспорядочно кувыркаясь.
В аналогичной ситуации вертолет способен к авторотации, т. е. тормозит падение за счет вращения несущего винта набегающим потоком воздуха, а самолет способен планировать.
Даже наличие шести или восьми несущих винтов не спасает мультикоптеры от крушения. Некоторым опытным пилотам удавалось спасти гекса- и октокоптеры при отказе одного из моторов, но это исключение из правила.
• Высокий порог знаний.
Можно купить готовый квадрокоптер и запускать его, не задумываясь, как он работает.
Но если вы решили сами строить квадрокоптер или модернизировать покупной, то придется хотя бы на начальном уровне научиться понимать радиосхемы, паять, прошивать микроконтроллеры, читать технические тексты , разбираться в принципе работы GPS и т. д…
• Низкая динамика и управляемость.
Обратная сторона стабильности квадрокоптеров — вялость и инерционность в управлении.
Особенно вяло квадрокоптеры управляются по рысканью (Yaw). Поэтому на квадрокоптере невозможно исполнить традиционные фигуры высшего пилотажа самолетов или инверсный полет, как на модели вертолета.
Впрочем, при наличии опыта на коптере можно эффектно исполнить переворот или пролет по кругу с вращением вокруг оси.
Но здесь надо понимать, что каждый летательный аппарат хорош для своих целей, и вялость в управлении вряд ли является недостатком, когда речь идет о полетах по камере, видеосъемке.
Типы рам, принцип работы квадрокоптера.
Конструкция рамы
Рассмотрим раму для конструкции «квадрокоптер» — самой распространенной в настоящее время. Прочие мультикоптеры строятся и функционируют по похожему принципу.
Рама состоит из двух частей: фюзеляжа (корпуса) и лучей (рисунок 1).
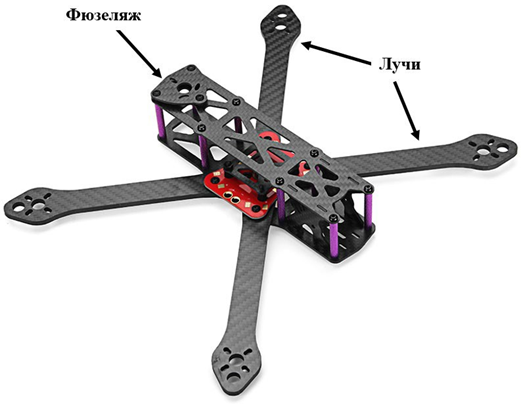
Рисунок 1 — Пример рамы квадрокоптера
В фюзеляже размещается электронная начинка коптера: полетный контроллер, плата распределения питания, аккумулятор. А вот антенны радиоаппаратуры (от приемника пульта ДУ и FPV-передатчика) стараются выносить подальше от корпуса и размещать на лучах.
Камера и другие полезные нагрузки в небольших моделях также размещаются в корпусе коптера, однако в более серьезных моделях они выносятся за его пределы и монтируются на стабилизированном подвесе. Также продвинутый БПЛА может быть оснащен системой сенсоров для детектирования препятствий, которые встраиваются непосредственно в корпус.
В серийных моделях корпус выполняется методом литья из пластика. В типовых моделях для самостоятельной сборки корпус представляет собой две пластины, нижнюю и верхнюю, соединенные стойками на винтах.
Лучи нужны для установки моторов и регуляторов. В серийных моделях регуляторы интегрированы в единую плату и находятся внутри корпуса. Лучи должны быть достаточно прочными и жесткими, чтобы выдержать вес конструкции квадрокоптера, минимизировать вибрации, возникающие в полете, а также быть достаточно устойчивыми к ударам и падениям.
Форма рамы
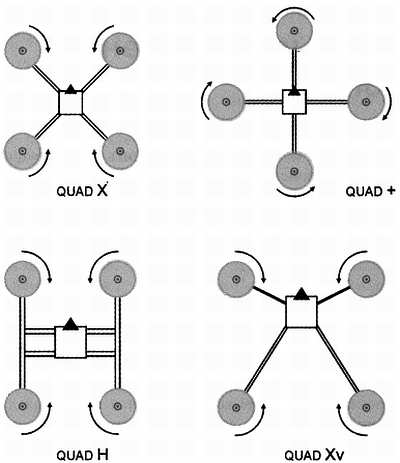
Рисунок 2
По расположению моторов относительно направления полета выделяют два основных типа рам: «+» и «X». Подвидом рамы типа «X» является рама типа «Н». Самые популярные на данный момент это:
— Х («Икс» или «Крест»);
— + («плюс»)
— H («Эн» или «Аш»)
— гибридный X;
— удлиненный X (Xv);
— квадрат;
— Unibody-рамы.
Рама типа «Х» или «True-X»

Рисунок 3– Рама типа «Х»
Фюзеляж этой рамы делается коротким, в виде квадрата, вся электроника собирается в центре, а лучи располагаются четко по углам квадрата (рисунок 3) Рама получается одинаковая по длине и ширине. Т.к. вес сосредоточен в центре, вес распределен равномерно, коптер становится более маневренным. Но, не смотря на данное преимущество, ограниченное место в центре делает сборку более сложной. Все компоненты приходится размещать «бутербродом», друг под другом, что не всегда удобно.Также очевидное преимущество такой рамы — удобное расположение видеокамеры, когда лучи рамы не попадают в кадр. У рамы типа «X» более высокая устойчивость к мелким авариям. Наиболее частой аварией, особенно в период обучения, является цепляние земли при быстром наклонном пролете или «заруливании», либо падение под углом.
Рама типа «+»
В случае «+»-образной рамы весь удар чаще приходится на один луч, который сильно страдает, тогда как при распределении удара на два луча ущерб обычно ограничивается сломанными пропеллерами.
Кроме того, большинству пилотов психологически комфортнее управлять именно типом «X».
В свою очередь, квадрокоптер с рамой типа «+» несколько быстрее и острее реагирует на команды «вправо-влево» и «вперед-назад», поэтому больше подходит любителям динамичного пилотирования.
Рама типа «+» не стала такой распространенной, как рама типа «Х» еще и из-за переднего пропеллера, который попадает в поле зрения камеры, что многим не нравится.
Удлиненный «Х (Xv)»
Рисунок 4
Соответственно своему названию, представляет собой раму «Х» с удлиненной базой (рисунок 4)
Рама, которую мы условно обозначили «Quad Xv», имеет несимметричные лучи. Такая рама часто используется при фото- и видеосъемке с воздуха. Дело в том, что для любого квадрокоптера должно соблюдаться условие симметрии по весу. Иначе говоря, центр тяжести конструкции должен находиться в точке пересечения диагоналей квадрата, образованного осями моторов. Если вы крепите в передней части рамы тяжелую фото- или видеокамеру, то удлиненные задние лучи играют роль противовеса. Однако и в этом случае моторы, как правило, расположены по диагоналям воображаемого квадрата.
Что будет, если центр тяжести смещен? Разумеется, полетный контроллер постарается поддерживать раму в строго горизонтальном положении за счет различия в оборотах моторов. Если дисбаланс невелик, то в статичном режиме, без внешних воздействий, квадрокоптер достаточно долго будет висеть ровно. Но при этом моторы будут работать в разных режимах нагрузки. У более нагруженных моторов останется меньший динамический запас оборотов и мощности, чтобы отработать «команды» полетного контроллера на компенсацию порывов ветра или управляющие сигналы с пульта. В результате появится некомпенсированное отклонение от горизонтали и квадрокоптер начнет дрейфовать в сторону смещенного центра тяжести. Подготовленные пользователи могут применить специальные настройки программы контроллера для компенсации негативного эффекта от смещенного центра тяжести, но в общем случае асимметрии следует избегать.
Рама типа «H»
По сравнению с рамой «Х», центральная часть данной рамы более длинная, что делает сборку и ремонт проще и удобнее. Крепление лучей к фюзеляжу спереди и сзади делает раму похожей на букву «Н» (рисунок 101).
Камеру и аккумулятор в такой раме размещают по верхней пластине, распределяя все по одному направлению, что приводит к неравномерному распределению момента инерции, особенно по тангажу. То есть, наклоны вперед и назад будут тратить больше энергии, чем наклоны влево-вправо.
Среди любителей FPV гонок нет общего мнения, какую раму лучше использовать. Считается, что для плавного фристайла подходит «H» рама, для быстрых и маневренных поворотов предпочтительнее использовать раму «X». В попытках объединить преимущества обеих рам были созданы рамы-гибриды.
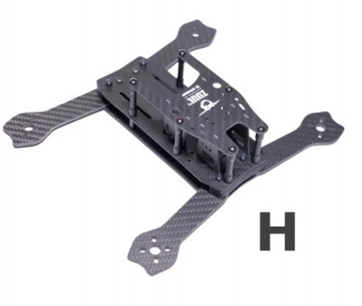
Рисунок 101 – Рама типа «Н»
Гибридная рама «Х»
Гибридная рама «Х» имеет фюзеляж от рамы «Н», а лучи соединены как в раме
«Х» (рисунок 102). С точки зрения физики, распределение веса осталось таким же, как и в раме «Н», что делает ее похожей на обычную раму «Н», но разница будет в распределении точек передачи вибраций от моторов к полетному контроллеру.

Рисунок 102 – Рама типа гибридный «Х»
Рама типа «Квадрат»
Представьте раму «Х», где между лучами добавили соединяющие их ребра. Вот так и выглядит рама «Квадрат» (рисунок 104). За счет жесткости соединений получается рама, которую непросто сломать. Минус такой конструкции в повышенном воздушном сопротивлении и большем весе. Подходит для обучения начинающих пилотов, но не походит для маневренных полетов.

Рисунок 104 — Рама типа «Квадрат»
Unibody рамы
Unibody, или цельные рамы, составляют единую конструкцию с лучами (рисунок 103). Делается так для того, чтобы упростить сборку, уменьшить вес и количество элементов крепления. Минус подобной рамы в неремонтопригодности, так как при поломке одного луча придется менять раму целиком, а также полностью разбирать коптер.

Рисунок 103 — Рама типа «Unibody»
Главным врагом любого, а тем более летающего, устройства, являются вибрации. Поэтому лучи рам серийного производства чаще всего имеют неплоскую форму: это могут быть карбоновые трубки или литой пластик прямоугольного, либо более сложного сечения, но не плоская пластина. Внутри лучей, изготовленных методом литья, могут находиться дополнительные ребра жесткости.
Вне зависимости от выбранной рамы при подборе или проектировании коптера нужно помнить главное: центр тяжести устройства должен находиться на пересечении его диагоналей (прямых, проведенных через центры моторов крест-накрест).
Даже если рама полностью симметрична, у квадрокоптера всегда есть условное направление «вперед», в котором он по умолчанию полетит при отклонении рукоятки пульта по оси Pitch вперед. Это направление привязано к полетному контроллеру, который монтируется на раме в строго определенном положении.
Рама может быть как со складными, так и с фиксированными лучами. На летные качества это не влияет, при выборе конструкции нужно исходить из соображений простоты изготовления, стоимости, удобства транспортировки, при условии соблюдения достаточной прочности.
Классы рам
В среде любителей самостоятельно собирать коптеры и пилотов-гонщиков принята классификация по классам рам в зависимости от их диагонали. Например,
«250 рама» означает, что диагональ такого коптера 250 мм (25 см).
Диагональ измеряется между центрами моторов, то есть не включает в себя размер пропеллеров.
Популярный «250й коптер» — это типичный гоночный или хобби-класс. Не менее популярный «450й» — уже довольно крупное грузоподъемное устройство, на которое можно установить полезную нагрузку.
При разработке рамы нужно учитывать, что размеры рамы будут влиять на:
— момент инерции;
— общий вес устройства;
— максимальный размеров винтов, которые можно установить на коптер;
— сопротивление воздуху.
Чем дальше расположены моторы от центра, тем длиннее лучи и тем больший момент инерции будет у конструкции.
Говоря проще, чем меньше будет рама, тем более маневренным будет сам квадрокоптер, чем больше будет размеры рамы, тем больше будет ее вес и ее сопротивление воздуху (но одновременно возрастет и стабильность полета).
Материал рамы
Рамы квадрокоптеров изготавливаются из самых разных материалов: пластик, дерево, текстолит, стекловолокно, алюминий и др. Однако фаворит среди рам для самостоятельной сборки – карбон (он же углепластик) . Рисунок 105
Карбон во всех его вариациях является почти идеальным материалом для летающих устройств. Наполняющим и силовым элементом материала являются карбоновые волокна, а связующим веществом — полиэфирные композиции горячего либо холодного отверждения. Карбоновым волокнам присуща чрезвычайно высокая удельная прочность при малом весе.
В авиамоделизме применяются следующие разновидности карбоновых материалов.
• Карбоновая ткань.Изготавливается из длинных волокон методом перекрестного плетения. В зависимости от технологии бывает из скрученных и прямых волокон, различается по плотности плетения. Применяется для формовки объемных изделий (каркасы, кожухи). Из карбоновой ткани методом вакуумной формовки изготавливают особо прочные и легкие пустотелые объемные рамы коптеров, так называемые «корки».
• Листовой карбон.Изготавливается из нескольких слоев карбоновой ткани, пропитанной полиэфирной композицией с последующим холодным или горячим отверждением под прессом. Очень легок и прочен, почти не гнется, сверлится и фрезеруется труднее, чем стеклотекстолит. Стоит в несколько раз дороже стеклотекстолита.
• Карбоновые трубки
Карбоновые трубки изготавливаются либо накручиванием нескольких слоев карбоновой ткани на оправку с пропиткой смолой, либо экструзией полимерной массы с наполнителем из карбоновых волокон. Это очень хороший материал для изготовления лучей рамы либо сборной трубчатой рамы целиком.
Но у него есть серьезный недостаток: карбоновым трубкам, особенно изготовленным из навитой ткани, присуща склонность к резко выраженным пикам резонанса на частотах вибрации.
• Экструдированные профили.
Экструдированные профили (pulltruded carbon) изготавливаются экструзией полимерной массы с наполнителем из карбоновых волокон через профильную фильеру.
Это могут быть круглые, квадратные или прямоугольные прутки, трубчатые профили. Материал различается по длине и ориентации карбоновых волокон. Дешевые материалы изготавливаются с наполнителем из коротких, хаотично ориентированных, карбоновых волокон. Как правило, это профили относительно большого сечения. Более дорогие и прочные профили содержат длинные волокна, ориентированные вдоль профиля.
При изготовлении коптеров популярны трубчатые профили комбинированного сечения (рис. 5): квадратные снаружи, но с круглым отверстием внутри (square tube). Такие профили сочетают высокую удельную прочность круглой трубки и удобство монтажа квадратного профиля. Рисунок 5
Дело в том, что при изготовлении лучей из круглой трубки для крепления моторов и стыковки с рамой приходится применять специальные хомуты и кронштейны, а для квадратного профиля они не нужны.
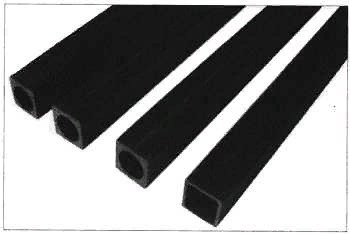
Рисунок 5. Карбоновый профиль комбинированного сечения
При этом у карбона есть три существенных недостатка:
— Электропроводность. При сборке коптера на карбоновой раме необходимо обеспечить надежную изоляцию всех электрических компонентов во избежании замыкания;
— Карбон не является радиопрозрачным. Корпус из углепластика заглушает радиосигналы, поэтому все антенны радиосвязи должны быть выведены наружу на расстояние большее, чем 20мм.
— Хорошая проводимость вибрации.

Рисунок 105 – Серийная рама из карбона
В самодельных прототипах часто применяется фанера (рисунок 106). Высокая доступность станков лазерной резки, низкая стоимость материала и почти мгновенная скорость изготовления сделала ее не менее распространенным материалом, чем карбон (для обработки которого требуются гораздо более дорогие и сложные фрезерные станки) и идеальным материалом для тестирования летающих прототипов.

Рисунок 106 – Квадрокоптер на фанерной раме
Литой пластик.Лучший материал для корпуса серийного устройства. Пластиковые корпуса можно сделать достаточно герметичными, чтобы защитить электронику коптера от дождя или снега (рисунок 107). При этом они остаются прочными, в том числе за счет ребер жесткости, которые невозможно сделать в карбоновой раме.

Рисунок 107 – Погодозащищенный квадрокоптер Геоскан «Салют» для создания световых шоу. Рама – литой пластик с ребрами жесткости
Рамы для совсем маленьких квадрокоптеров (cinewhoop, синевуп) могут быть даже напечатаны на 3D принтере (рисунок 108) в случае, если в результате получится монолитная конструкция (которую, опять же, можно усилить ребрами жесткости). Однако для крупной конструкции с сильно выдающимися лучами такой способ производства рамы не подойдет из-за высокой гибкости пластика.


Рисунок 108 – Рамы, напечатанные на 3D принтере
Радиотехнический стеклотекстолит.Изготавливается из нескольких слоев стеклоткани, пропитанных эпоксидной смолой. На производстве листы зажимаются в пресс и подвергаются горячему отверждению. Материал прочный, достаточно легко сверлится, пилится и фрезеруется в домашних условиях, но почти не поддается лазерной резке. Обычно применяется для изготовления печатных плат, поэтому продается в радиомагазинах с покрытием медной фольгой с одной или двух сторон. Доступность и прочность сделали этот материал очень популярным.
Серьезными недостатками стеклотекстолита являются большой удельный вес и склонность к расслаиванию при механических нагрузках.
Конструкционный текстолит.По структуре аналогичен радиотехническому, но более прочен, меньше склонен к расслаиванию под нагрузкой.
В отличие от радиотехнического обладает худшими изолирующими свойствами, но для изготовления механических деталей это не имеет значения.
Сверлится, пилится и фрезеруется так же легко, как и радиотехнический. Не требует удаления фольги. Обычно окрашивается в черный, реже в коричневый или зеленый цвет. Иногда имеет текстурированную тиснением поверхность.
К сожалению, этот материал редко встречается в продаже в России, хотя на производстве в Китае используется очень широко, как дешевый заменитель карбона.
В России можно попробовать приобрести листовой «электротехнический текстолит G10», но его цена будет выше, чем у китайского конструкционного.
• Смешанные материалы.
Китайская новация, направленная на снижение себестоимости и цены материала. В производстве экструдированных профилей наполнитель может состоять из смеси карбоновых (-60-70 %) и стеклянных (-40-30 %) волокон. В производстве листовых материалов берется окрашенный в черный цвет технический текстолит G10 и с двух сторон облицовывается одинарным слоем карбоновой ткани. По внешнему виду для неопытного взгляда такой материал неотличим от чисто карбонового листа.
Типы рам, принцип работы квадрокоптера.
Защитная конструкция квадрокоптеру нужна для защиты лопастей и моторов, потому что в случае падения удар приходится на винты, моторы и лучи, что приводит к их частой поломке. Конечно, наличие защиты приводит к увеличению веса и сопротивления воздуху, но именно она является гарантией безопасности квадрокоптера и его долговечности. Материалами защиты обычно является стекловолокно или пластик.
Существует множество вариаций защиты, некоторые из них приведем ниже:
Дуговая защита Являются самым простым и легким вариантом защиты (рисунок 109). Крепятся на лучах под моторами и защищают винты и моторы за счет своей упругости. Недостаток такой защиты в том, что если на пути коптера будет ветка или объект, который проходит между лучами, то коптер может врезаться собственным корпусом, что приведет к поломке электроники. Так же дуги плохо защищают моторы от попадания в них объектов сверху

Рисунок 109 – Пример дуговой защиты
Корпусная защита
Корпусная защита крепится по всему корпусу квадрокоптера, защищая не только моторы, но и раму в целом (рисунок 110). По сравнению с предыдущим вариантом, данная защита более эффективна при прямых столкновениях коптера с объектами и стенами. Данная защита популярна среди учебных квадрокоптеров.
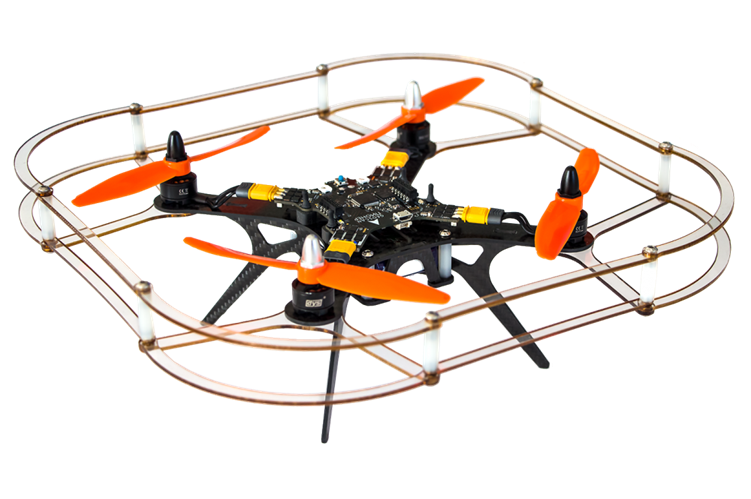
Рисунок 110 – Пример корпусной защиты
Сферическая защита
Данная защита предотвращает столкновение коптера по всем осям и направлениям (рисунок 111), но минус данной защиты ее сопротивлении воздуху. Наличие такой защиты эффективно лишь на маленьких квадрокоптерах или игрушках.

Рисунок 111 – Пример сферической защиты
Клетка
Данная защита напоминает клетку за счет своей конструкции (Рисунок 112). Надевается на моторы как клетка, защищая от попадания в них объектов. Минус такой
защиты в том, что клетка мешает воздушному потоку моторов, что приводит к ухудшению полетных характеристик.

Рисунок 112 – Пример защиты типа “Клетка”
Подвес и крепления к раме посадочного шасси
При проектировании гоночных коптеров обычно не учитывается наличие ног, так как это приводит к добавлению лишнего веса. Поэтому, если ноги (посадочные опоры) на них и устанавливают, то обычно они маленького размера и находятся под моторами.
Когда речь заходит о коптере, на котором установлен подвес, например, с камерой, расположение шасси становится критическим вопросом. Ноги должны быть достаточно упругими, чтобы амортизировать приходящую на них нагрузку и вибрации после посадки, а их расположение на раме должно не приводить к поломке корпуса.
Подвесы часто располагаются по центру тушки рамы, либо выдвинутыми вперед. Во втором случае вес подвеса нужно компенсировать при сборке, а также за счет правильного расположения ног, удерживающих устойчивое положение коптера при смещении центра масс.
Есть насколько вариантов расположения шасси:
Крепление двух широких ног к фюзеляжу под углом.
Популярный метод для больших грузоподъемных квадрокоптеров. Обычно расположены под углом относительно корпуса (около 30 градусов относительно вертикальной оси), создавая таким образом амортизационную подушку при посадке. Ноги крепятся по ширине фюзеляжа для равномерного распределения массы с обеих сторон (Рисунок 113).

Рисунок 113 – Вариант широких посадочных опор
Крепление 4-х посадочных стоек к раме
Используются на средних коптерах, располагаются либо по 4-м сторонам фюзеляжа относительно крепления лучей, либо непосредственно под моторами (Рисунок 114). Минус второго способа, что при достаточно жестком падении, такое расположение стоек приводит к поломке лучей. Поэтому расположение стоек непосредственно под корпусом рамы обладает большими шансами на предотвращение поломки рамы.

Рисунок 114 – Примеры посадочных стоек